Robotics History
TSC Robotics

Academic scholarships are available to new incoming students enrolled in the Robotics
Program. The scholarships are $1,200 per semester for up to two semesters. Students
must enroll in at least 15 credit hours per semester and must maintain a GPA of 3.0
or higher. Cumulative GPA will be used for continuing eligibility.
Trinidad Campus contact:
Cindy Clements
Robotics Team History
Trinidad State Robotics Team got its start in late 2009 when the college was invited to join the Colorado Space Grant Consortium. The program has evolved gradually and each team has improved on the previous year’s design. In the spring the students participate in COSGC’s Robotics Challenge at the Great Sand Dunes National Park. Students then submit a research paper to the consortium and present their research at the COSGC’s Research Symposium.
The first paper was accepted in 2011 and since then the team has won the People’s Choice Award 5 times and their paper/presentation has won a session award twice.
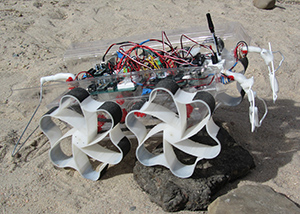
2022: SWARM
(Scorpion ~ Wasp ~ Ant ~ RollyPolly ~ Mantis)
- 5 Robots total and 3 communication towers:
- Sensors on all bots: 4 Ultrasonics, 2 Infrareds, 1 Tilt, 1 Compass, 1 Xbee, bump sensors,
- Sensors on the towers: Ultrasonics, Compass, Xbee
- 6 Custom Printed Circuit Boards (2 designs)
- Language: Propeller C
- All Wheels 3D Printed in flexible materials
- Drone Bodies 3D Printed and acrylic
- Completed 5 courses at the Sand Dunes by ourselves.
- Demonstrating autonomous mapping of an obstacle course
- Best robots under 1.5 kg (weighed between 580 grams to 720 grams).
- Best Advanced Autonomous Mapping




2021: BACON
(Beacon All-Terrain Communicating Operational Navigator)
- 3 Robots total: A mothership and 2 drones
- Sensors on mothership: 3 Ultrasonics, 3 Infrareds, 1 Tilt, 1 Compass, 1 Xbee
- Sensors on each of two drones: 2 Ultrasonics, 1 Infrared, 1 Tilt, 1 Compass, 1 Xbee
- Sensors on beacon: Pixy2 Sensor, 1 Xbee
- 3 Custom Printed Circuit Boards
- Language: Propeller C and Arduino C
- All Wheels 3D Printed
- Drone Bodies 3D Printed
- Mothership cut from acrylic
Completed all 6 courses of our own design, since we went to the Sand Dunes by ourselves.
Successfully loaded and unloaded drones from the mothership.
Semi-successfully mapped locations of obstacles.


2020 : WALKER
- Sensors: Ultrasonics, Compass, Tilt, Beacon, Infrareds, 1 LCD, Bump.
- Custom Printed Circuit Board
- Language: PropC.
- Wheels 3D Printed.
- Completed all 6 courses of our own design since we went to the dunes by ourselves.
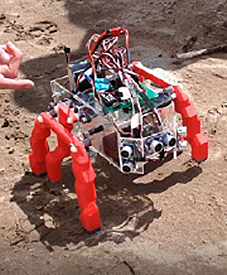

2020 : NITE
(Navigating Independent Terrain Explorer)
- Sensors: Ultrasonics, Compass, Tilt, Beacon, Infrareds, 1 LCD, Bump.
- Custom Printed Circuit Board
- Language: PropC.
- Wheels 3D Printed.
- Completed all 6 courses of our own design since we went to the dunes by ourselves.

2019: GRIFFEN
(Golden Roaming Intelligent Fantabulous Fabricated Independent Navigator)
- Sensors: Ultrasonics, Compass, Tilt, Beacon, Infrareds, 1 LCD, Bump.
- Custom Printed Circuit Board
- Language: PropC.
- Wheels 3D Printed.
- Completed all 6 courses.